Intelligent feature selection method for accurate laser-based mapping and localisation in self-driving cars
N. Hernández, I. G. Daza, C. Salinas, I. Parra, J. Alonso, D. Fernández-LLorca, M. Á. Sotelo.
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2018.
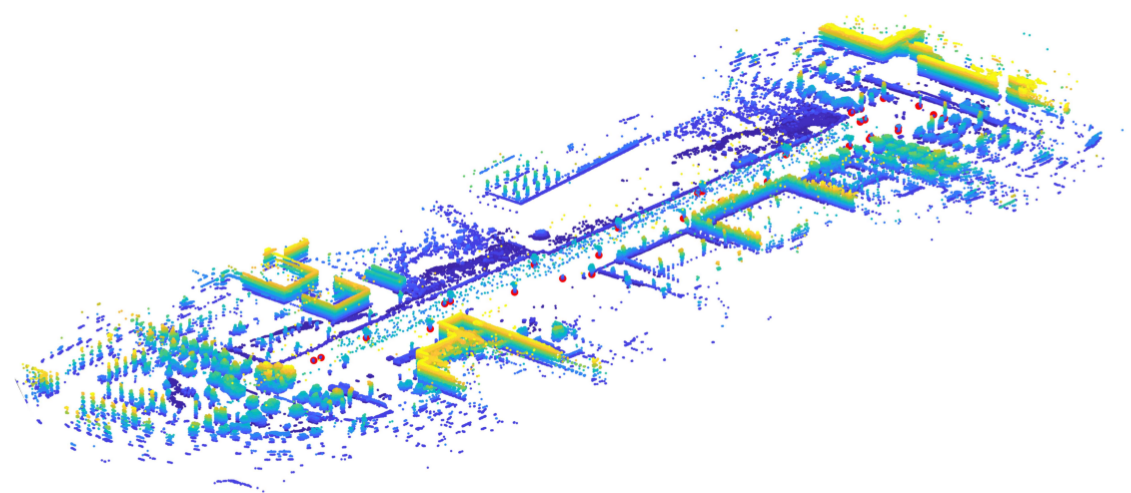
Abstract: Robust 3D mapping has become an attractive field of research with direct application in the booming domain of self-driving cars. In this paper, we propose a new method for feature selection in laser-based point clouds with a view to achieving robust and accurate 3D mapping. The proposed method follows a double stage approach to map building. In a first stage, the method compensates the point cloud distortion using a rough estimation of the 3-DOF vehicle motion, given that range measurements are received at different times during continuous LIDAR motion. In a second stage, the 6-DOF motion is accurately estimated and the point cloud is registered using a combination of distinctive point cloud features. The appropriate combination of such features, namely vertical poles, road curbs, plane surfaces, etc. reveals to be a powerful tool to achieving accurate mapping and robustness to aggressive motion and temporary low density of features. We show and analyse the results obtained after testing the proposed method with a dataset collected in our own experiments on the Campus of the University of Alcalá (Spain) using the DRIVERTIVE vehicle equipped with a Velodyne-32 sensor. In addition, we evaluate the robustness and accuracy of the method for laser-based localisation in a self-driving application.