Vehicle trajectory prediction on highways using bird eye view representations and deep learning
R. Izquierdo, Á. Quintanar, D. F. Llorca, I. García, N. Hernández, I. Parra, M. Á. Sotelo.
Applied Intelligence
DOI: https://doi.org/10.1007/s10489-022-03961-y
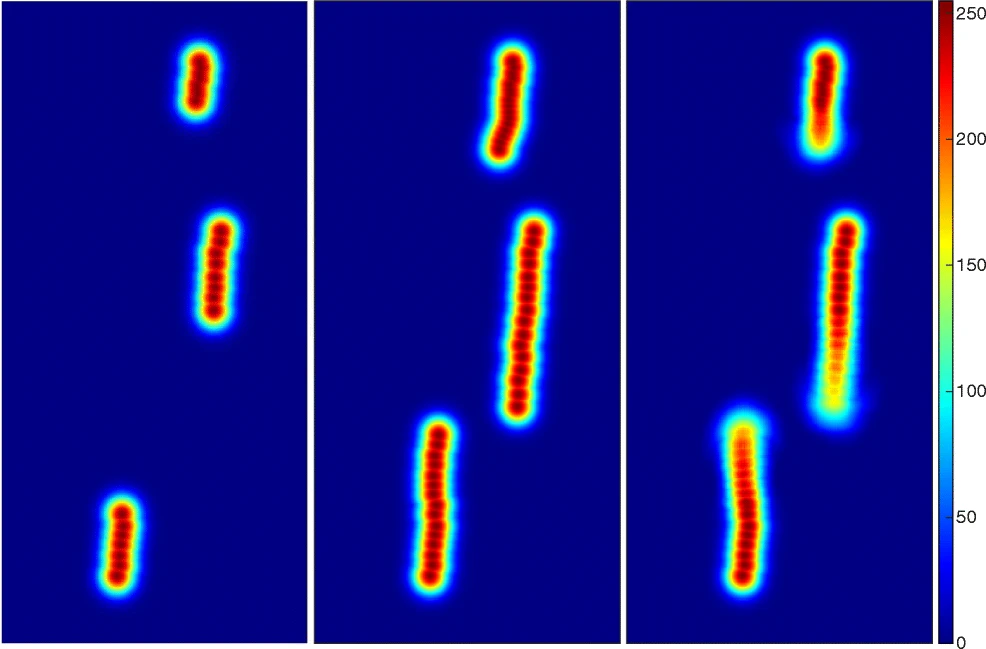
Abstract: This work presents a novel method for predicting vehicle trajectories in highway scenarios using efficient bird’s eye view representations and convolutional neural networks. Vehicle positions, motion histories, road configuration, and vehicle interactions are easily included in the prediction model using basic visual representations. The U-net model has been selected as the prediction kernel to generate future visual representations of the scene using an image-to-image regression approach. A method has been implemented to extract vehicle positions from the generated graphical representations to achieve subpixel resolution. The method has been trained and evaluated using the PREVENTION dataset, an on-board sensor dataset. Different network configurations and scene representations have been evaluated. This study found that U-net with 6 depth levels using a linear terminal layer and a Gaussian representation of the vehicles is the best performing configuration. The use of lane markings was found to produce no improvement in prediction performance. The average prediction error is 0.47 and 0.38 meters and the final prediction error is 0.76 and 0.53 meters for longitudinal and lateral coordinates, respectively, for a predicted trajectory length of 2.0 seconds. The prediction error is up to 50% lower compared to the baseline method.